HARVESTING PALM THROUGH AUTOMATIC TREE CLIMB MACHINE WITHOUT HUMAN USING ARDUINO TECHNIQUE
HARVESTING PALM THROUGH AUTOMATIC
TREE CLIMB MACHINE WITHOUT HUMAN
USING ARDUINO TECHNIQUE
We have seen the struggles faced by tree climbers, especially when it comes to
climbing the tall or areca nut trees. Here in this coastal area, we have lots of palm trees,
but finding a person to climb and pluck the palm has been hard. Traditionally professional
climbers have been engaged by palm planters for plucking the fruits from the top of the
palm trees, by using their hands and legs, which is a herculean task.
To make life easier for present tree climbers, a new innovative tree climbing machine
can be used that would make life and climbing a cake walk for the person.
Existing Technique
This method is used for coconut tree ,palm trees. The arm is given in up and down
movement. The tip has a saw tooth blade which is used to cut the fruits/coconut.
The machine can rotate by 360 degree Inside Spring load is fixed so it can compress
and expand based on the diameter of the tree.
Drawback
In this machine one human is present to operate the climbing machine on/off ,rotating
purpose.
Proposed method
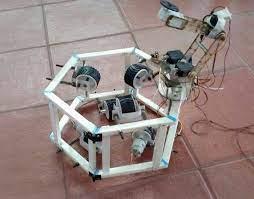
We use Arduino Technique to operate the robotic climbing machine digitally. Camera is
attached at the top of the blade. so we are able to see the blader position. We can
control the robotic machine using Web Application. Usually robot can move by
itself, but sometimes we need to control them. In this project I will control an arm
robot using a smartphone. Arm robot there is a servo motor which is controlled
through an arduino. Arduino receives a command to move the servo from the data
sent by the mobile application. like people who communicate remotely, we need a
wireless device, here I use Bluetooth so that Arduino and mobile applications can
communicate.


BLOCK DIAGRAM 1
BLOCK DIAGRAM 2


Comments
Post a Comment